
NASA-IHMC X1 Mina Exoskeleton





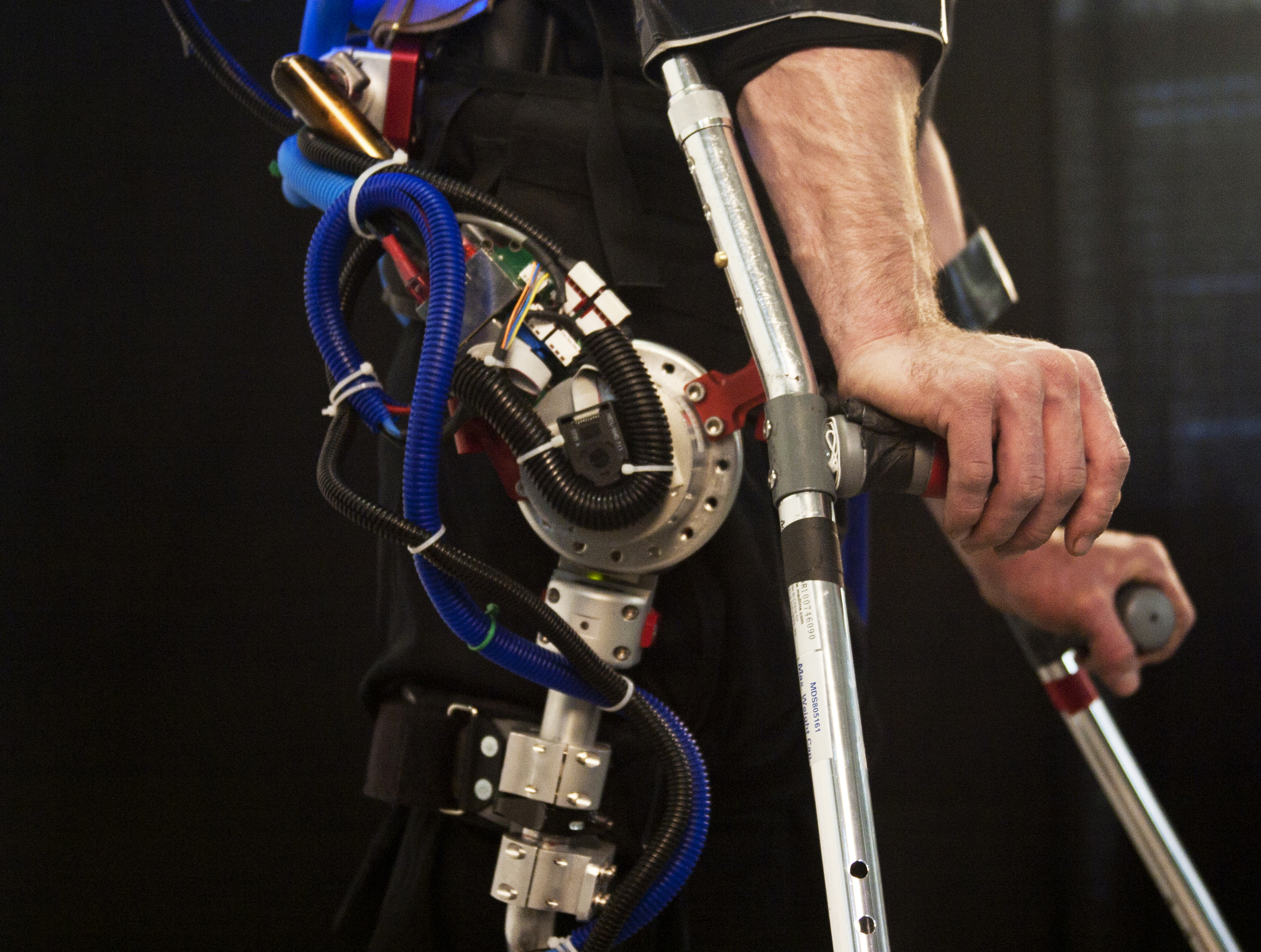


The X1 and Mina v1 powered lower extremity exoskeletons were jointly developed by NASA Johnson Space Center and IHMC. The focus of this collaboration was to develop a robotic device for a range of applications, including mobility assistance for abled and disabled users, rehabilitation, and exercise. The robot features torque controllable actuators at the hip flexion/extension and knee flexion/extension and passive joints to allow for hip ab/adduction and hip internal/external rotation. The powered joints are capable of variable impedance, ranging from zero impedance for transparent mode to high impedance for stiff position control. The links of the exoskeleton can be adjusted to the user’s body size such that the powered joints are co-located with the user’s joint, creating an anthropomorphic structure.
The Exoskeleton Team:
Peter Neuhaus, IHMC Lead
Travis Craig
Nick Payton
Jeremy Gines
Chris Jumonville
Jerryll Noorden
